盈豐泰飲食服務管理公司 專業餐飲服務,打造卓越用餐體驗
在當今快節奏的社會中,餐飲服務已不僅僅是簡單的食物供給,更是一種綜合性的體驗、效率與品質的展現。盈豐泰飲食服務管理公司,作為行業內的專業服務提供商,始終致力于通過系統化、標準化和人性化的管理,為客戶打造卓越的餐飲服務解決方案。
1. 專業定位與核心優勢
盈豐泰飲食服務管理公司專注于為企事業單位、學校、醫院、大型活動及商業綜合體等提供全方位的餐飲服務管理。公司的核心優勢在于其深厚的行業經驗、嚴謹的質量管控體系和創新的服務理念。通過科學的營養配餐、高效的運營流程和貼心的服務細節,盈豐泰確保每一餐都達到安全、健康、美味的標準,從而提升客戶的整體滿意度和品牌價值。
2. 全面的服務內容
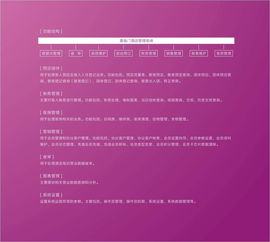
公司的服務涵蓋多個層面:
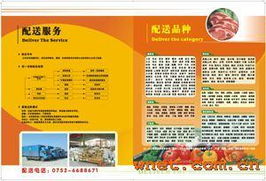
- 團餐管理:針對企業、工廠和機構食堂,提供從菜單設計、食材采購、烹飪制作到現場服務的全鏈條管理,注重膳食平衡與成本控制。
- 活動餐飲:為會議、慶典、體育賽事等大型活動提供定制化餐飲服務,包括自助餐、茶歇、外燴等,確保活動順利進行。
- 營養咨詢與健康管理:結合現代營養學,為特殊群體(如醫院患者、學校師生)設計個性化餐單,促進健康飲食文化的普及。
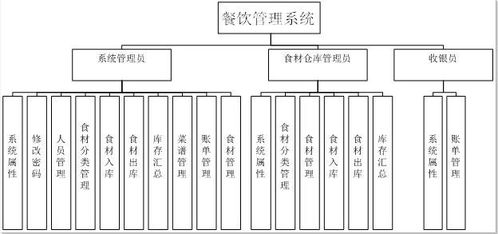
- 餐飲空間設計與運營支持:協助客戶優化用餐環境,提升服務效率,并通過數字化工具實現智能化點餐和數據分析。
3. 品質與安全體系
食品安全是餐飲服務的生命線。盈豐泰建立了嚴格的HACCP(危害分析與關鍵控制點)體系,從供應商篩選、食材檢測、加工過程到成品配送,每個環節都實施全程監控。公司還定期對員工進行食品安全和衛生培訓,確保服務團隊具備高度的責任意識和專業素養。通過引入綠色環保理念,盈豐泰倡導使用可持續食材和環保包裝,為環境保護貢獻力量。
4. 創新與可持續發展
面對市場變化和客戶需求的多樣化,盈豐泰不斷推陳出新。例如,結合智能科技開發在線訂餐系統,提升用餐便捷性;引入地方特色菜肴和文化元素,豐富餐飲選擇;公司關注員工的職業發展與福利,打造穩定的服務團隊,為長期合作奠定基礎。在可持續發展方面,盈豐泰積極推動減少食物浪費、能源節約和社會責任項目,實現經濟效益與社會效益的雙贏。
5. 客戶案例與社會影響
多年來,盈豐泰已成功服務于眾多知名企業和機構,贏得了良好的口碑。例如,在為某大型科技公司提供員工餐飲服務時,通過優化菜單和提升服務效率,員工滿意度顯著提高;在支援社區公益活動時,公司提供營養餐食,展現了企業的社會擔當。這些案例不僅體現了盈豐泰的專業能力,也彰顯了其以客戶為中心、回饋社會的價值觀。
###
盈豐泰飲食服務管理公司憑借其專業、安全和創新的服務,正在成為餐飲管理領域的標桿。公司將繼續深耕行業,以科技驅動和服務升級,為更多客戶提供高品質的餐飲體驗,共同邁向更健康、更高效的生活方式。無論是日常用餐還是特殊場合,選擇盈豐泰,就是選擇安心與卓越。
如若轉載,請注明出處:http://www.naoeng.cn/product/58.html
更新時間:2026-06-19 11:51:17